Multi-Parameter Confidence Contours with Spey#
This notebook demonstrates how to map multi-dimensional chi-squared confidence contours using the spey.multiparameter sub-package. We work with a two-bin counting experiment whose signal is a linear combination of three benchmark signal shapes, controlled by three free parameters. The goal is to identify the full set of signal-shape parameter combinations that are compatible with the observed data at the 95% confidence level.
The signal strength \(\mu\) is held fixed at 1 throughout. The contour lives in the 3-dimensional space of signal-shape parameters \((c_0, c_1, c_2)\).
Contents#
1 · Theoretical Background#
The Statistical Model#
We use the multivariate Gaussian likelihood for correlated bins:
where \(n\) is the observed data, \(b\) the background yields, \(\Sigma\) the covariance matrix, and \(\mu\) the overall signal strength. In this analysis we fix \(\mu = 1\) and let the signal-shape parameters \((c_0, c_1, c_2)\) vary freely.
Wilks’ Theorem and the Confidence Contour#
Let \(\theta_s = (c_0, c_1, c_2)\) be the signal-shape parameter vector and \(\hat\theta_s\) its maximum-likelihood estimate (with \(\mu=1\) fixed). Under Wilks’ theorem the test statistic
follows a \(\chi^2_k\) distribution with \(k=3\) degrees of freedom (one per free parameter). The 95% confidence region is
The boundary — the confidence contour — is the 2-dimensional surface satisfying
Why fix \(\mu=1\)? In many HEP analyses the signal-shape parameters \((c_0,c_1,c_2)\) encode physical model parameters (e.g. couplings, masses) while \(\mu\) is a nuisance-like overall normalisation. Fixing \(\mu=1\) and profiling the shape parameters gives the confidence region in the physical parameter space of interest.
2 · Experimental Setup#
We have a two-bin experiment. The physical signal is a linear combination of three benchmark templates:
where \(c_1\) enters quadratically — typical when the parameter corresponds to a coupling that appears in the amplitude squared. The total expected yield in each bin is
The three free parameters \((c_0, c_1, c_2)\) define a 3-dimensional signal-parameter space. find_contour maps the 2-dimensional boundary of the 95% CL region in this space.
# ── Observed data ────────────────────────────────────────────────────────────
data = np.array([36, 33])
# ── Background yields and covariance ─────────────────────────────────────────
background_yields = np.array([50.0, 48.0])
covariance_matrix = np.array(
[[144.0, 13.0], [25.0, 256.0]] # σ²_0, Cov(0,1)
) # Cov(1,0), σ²_1
sigma_b = np.sqrt(np.diag(covariance_matrix))
print(f"Background yields : {background_yields}")
print(f"Background σ (diag) : {sigma_b}")
print(f"Observed data : {data}")
print(f"Deficit (data - bkg): {data - background_yields} (negative → data below bkg)")
print(f"Total Pull (data - bkg) / σ: {sum((data - background_yields)/sigma_b):.3f}")
Background yields : [50. 48.]
Background σ (diag) : [12. 16.]
Observed data : [36 33]
Deficit (data - bkg): [-14. -15.] (negative → data below bkg)
Total Pull (data - bkg) / σ: -2.104
# ── Signal templates ─────────────────────────────────────────────────────────
signal_yields1 = np.array([12.0, 15.0]) # process A
signal_yields2 = np.array([6.0, 16.0]) # process B
signal_yields3 = np.array([20.0, 10.0]) # process C
# ── Parametric signal as a function of shape parameters ──────────────────────
#
# param = (c0, c1, c2)
#
# The backend calls signal_yields(pars[1:]) at every evaluation,
# where pars = [mu, c0, c1, c2] is the full 4-dim parameter vector.
# We fix mu=1, so the effective expected yield is s(c0,c1,c2) + bkg.
#
def signal_yields(param: np.ndarray) -> np.ndarray:
"""Combined signal as a function of shape parameters (c0, c1, c2).
c1 enters quadratically: reflects a squared-coupling dependence
typical in EFT or BSM amplitude-squared contributions.
"""
return (
param[0] * signal_yields1
+ param[1] ** 2 * signal_yields2
+ param[2] * signal_yields3
)
print("Signal at (c0, c1, c2) = (1, 1, 1) :", signal_yields(np.ones(3)))
print("Signal at (c0, c1, c2) = (0, 0, 0) :", signal_yields(np.zeros(3)))
Signal at (c0, c1, c2) = (1, 1, 1) : [38. 41.]
Signal at (c0, c1, c2) = (0, 0, 0) : [0. 0.]
3 · Building the Statistical Model#
We construct a StatisticalModel using the MultivariateNormal backend with n_signal_parameters=3. This tells the backend that the callable signal_yields takes three extra parameters beyond \(\mu\). Internally the backend extends the optimiser parameter vector to
The model knows that index 0 is the POI (\(\mu\)) via cfg.poi_index = 0. find_contour uses cfg.poi_index to:
Exclude \(\mu\) from the contour search space.
Fix \(\mu=1\) when evaluating the NLL, by passing
fixed_poi_value=1.0to the internalfit()call.Extract the signal-parameter block of the Hessian for the whitening transform.
The resulting contour lives in the 3-dimensional space \((c_0, c_1, c_2)\).
# ── Construct the backend ─────────────────────────────────────────────────────
pdf_wrapper = spey.get_backend('default.multivariate_normal')
stat_model = pdf_wrapper(
signal_yields=signal_yields, # callable: (c0, c1, c2) → array[2]
background_yields=background_yields,
data=data,
covariance_matrix=covariance_matrix,
n_signal_parameters=3, # declares c0, c1, c2 as free parameters
analysis="multi_param_demo"
)
print(stat_model)
StatisticalModel(analysis='multi_param_demo', backend=default.multivariate_normal, calculators=['toy', 'asymptotic', 'chi_square'])
# ── Inspect the model configuration ──────────────────────────────────────────
cfg = stat_model.backend.config()
print(f"Total parameters : {cfg.npar} (mu + c0 + c1 + c2)")
print(f"All parameter names : {cfg.parameter_names}")
print(f"POI index (mu) : {cfg.poi_index}")
print()
print("find_contour will fix mu=1 and search for the contour in the")
print(f" {cfg.npar - 1}-dimensional subspace: {cfg.parameter_names[1:]}")
Total parameters : 4 (mu + c0 + c1 + c2)
All parameter names : ['mu', 'signal_par_0', 'signal_par_1', 'signal_par_2']
POI index (mu) : 0
find_contour will fix mu=1 and search for the contour in the
3-dimensional subspace: ['signal_par_0', 'signal_par_1', 'signal_par_2']
4 · Exploring the Likelihood Landscape#
Before running the full contour finder it is instructive to:
Locate the MLE of the signal parameters \(\hat\theta_s\) with \(\mu=1\) fixed.
Compute the NLL threshold \(T = \mathrm{NLL}(\hat\theta_s) + \Delta_{0.95}^{(k=3)}/2\).
Visualise 1-D NLL profiles along each signal-parameter axis.
The MLE is found by calling maximize_likelihood with fixed_poi_value=1.0 (fixes \(\mu=1\) in the optimizer) and poi_indices=[1, 2, 3] (returns \((c_0, c_1, c_2)\) values).
# ── Find the MLE of signal parameters with mu fixed at 1 ─────────────────────
#
# fixed_poi_value=1.0 → mu (pars[poi_index]) is pinned to 1
# poi_indices=[1,2,3] → return the fitted values of c0, c1, c2
#
signal_indices = [i for i in range(cfg.npar) if i != cfg.poi_index] # [1, 2, 3]
signal_names = [cfg.parameter_names[i] for i in signal_indices] # ['signal_par_0', ...]
k = len(signal_indices) # = 3
poi_dict, nll_min = stat_model.maximize_likelihood(
poi_indices=signal_indices,
return_nll=True,
fixed_poi_value=1.0, # fix mu=1; forwarded to fit() via **kwargs
)
theta_mle = np.array([poi_dict[i] for i in signal_indices]) # (c0_hat, c1_hat, c2_hat)
print("MLE of signal parameters (mu=1 fixed):")
for name, val in zip(signal_names, theta_mle):
print(f" {name:15s} = {val:+.4f}")
print(f"\nNLL at MLE : {nll_min:.6f}")
MLE of signal parameters (mu=1 fixed):
signal_par_0 = -1.0792
signal_par_1 = +0.3634
signal_par_2 = -0.0921
NLL at MLE : 7.090945
# ── Chi-squared threshold ─────────────────────────────────────────────────────
#
# DoF = k = 3 (signal-shape parameters only; mu is NOT profiled)
#
delta = chi2_dist.ppf(0.95, df=k) # Δ_{0.95}^{(k=3)}
threshold = nll_min + delta / 2.0 # NLL threshold T
print(f"Degrees of freedom : k = {k} (signal-shape parameters only)")
print(f"Chi-squared quantile : Δ = {delta:.4f} (at 95% CL, k=3)")
print(f"NLL threshold : T = {threshold:.6f}")
print()
print("Points θs with 2[NLL(θs) − NLL(θ̂s)] ≤ Δ lie inside the 95% CR.")
Degrees of freedom : k = 3 (signal-shape parameters only)
Chi-squared quantile : Δ = 7.8147 (at 95% CL, k=3)
NLL threshold : T = 10.998309
Points θs with 2[NLL(θs) − NLL(θ̂s)] ≤ Δ lie inside the 95% CR.
# ── 1-D NLL profiles along each signal-parameter axis ────────────────────────
#
# We build a reduced NLL function with mu=1 fixed:
# nll_fixed(signal_pars) = -logpdf([1, signal_pars[0], signal_pars[1], signal_pars[2]])
#
logpdf_fn = stat_model.backend.get_logpdf_func()
def nll_fixed(signal_pars):
"""NLL with mu=1 fixed; takes only the 3 signal-shape parameters."""
full_pars = np.concatenate([[1.0], signal_pars]) # [mu=1, c0, c1, c2]
return -float(logpdf_fn(full_pars))
scan_widths = [2.0, 2.0, 1.5]
latex_names = [r"$c_0$", r"$c_1$", r"$c_2$"]
fig, axes = plt.subplots(1, k, figsize=(13, 3.8))
fig.suptitle(r"1-D NLL profiles with $\mu=1$ fixed (others at MLE)", fontsize=13)
for i, (ax, name, width) in enumerate(zip(axes, latex_names, scan_widths)):
grid = np.linspace(theta_mle[i] - width, theta_mle[i] + width, 120)
pars_scan = np.tile(theta_mle, (len(grid), 1))
pars_scan[:, i] = grid
chi2_vals = 2.0 * (np.array([nll_fixed(p) for p in pars_scan]) - nll_min)
ax.plot(grid, chi2_vals, color="steelblue", lw=2)
ax.axvline(
theta_mle[i],
color="tomato",
ls="--",
lw=1.5,
label=rf"$\hat{{\theta}}$ = {theta_mle[i]:.3f}",
)
ax.axhline(
delta,
color="k",
ls=":",
lw=1.2,
label=rf"$\Delta_{{0.95}}^{{(3)}}$ = {delta:.2f}",
)
ax.set_xlabel(name, fontsize=12)
ax.set_ylabel(r"$\chi^2(\theta_s)$", fontsize=12)
ax.legend(fontsize=8)
ax.set_ylim(0, delta * 2.5)
plt.tight_layout()
plt.show()
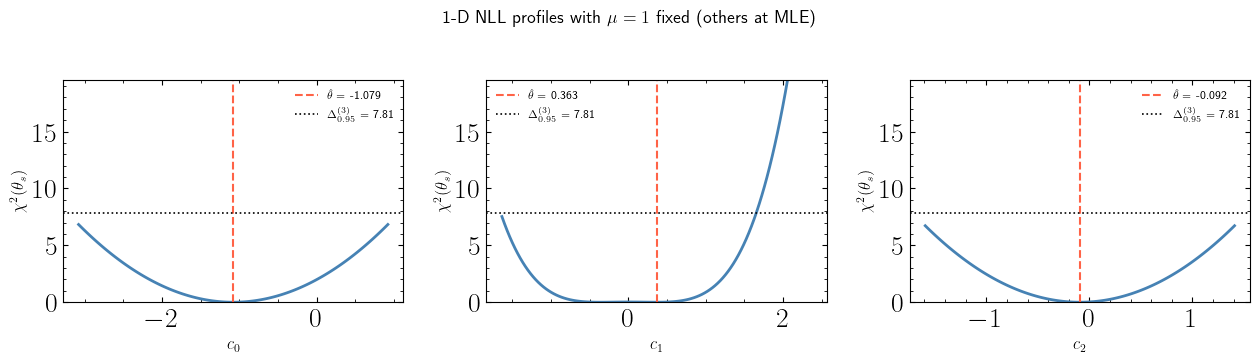
The horizontal dotted line marks \(\Delta_{0.95}^{(k=3)} \approx 7.81\). Each 1-D profile intersection gives a marginal 95% CI for that parameter — but the full multi-dimensional shape can have non-trivial correlations, motivating the 2-D surface mapping.
5 · Running find_contour#
find_contour detects cfg.poi_index automatically and:
Fixes \(\mu=1\) when evaluating the NLL by passing
fixed_poi_value=1.0to the optimizer.Builds a reduced NLL \(\mathrm{NLL}(c_0,c_1,c_2)\) using
autograd.numpy.concatenateto insert \(\mu=1\) at the correct position — keeping the function fully differentiable for the RATTLE stage.Uses the \(3\times 3\) signal-parameter block of the full \(4\times 4\) Hessian for the whitening transform.
Returns contour points in the 3-D signal-parameter space with DoF = 3 and \(\Delta_{0.95} \approx 7.81\).
Stage |
What it does |
|---|---|
Pre-whitening |
Fisher-information Cholesky in signal space → approximately spherical contour |
Radial search |
\(N\) random rays + Brent root-finding along each |
Gap detection |
Cosine-similarity coverage scoring → seed directions |
RATTLE HMC |
Constrained Hamiltonian chain walking along \(\mathrm{NLL}=T\) |
# ── Run the contour finder ────────────────────────────────────────────────────
#
# find_contour automatically uses cfg.poi_index to exclude mu and
# fix it at 1. No manual handling of mu is needed.
#
result = find_contour(
stat_model,
confidence_level=0.95,
n_radial=2000, # Stage 2: random radial rays
n_hmc_chains=100, # Stage 4: RATTLE chains (gap seeds)
n_hmc_steps=4000, # Stage 4: leapfrog steps per chain
hmc_step_size=0.05, # Stage 4: leapfrog step size ε
n_gap_candidates=3000, # Stage 3: candidate directions for gap detection
random_seed=42,
bounds=[(-50, 1), (None, None), (None, None)],
n_jobs=8,
)
print(result)
Running HMC Chain: 8it [00:00, 25.86it/s]
Spey - WARNING: An unstable version of Spey (0.2.7-b2) is being used. Latest stable version is 0.2.6.
Spey - WARNING: An unstable version of Spey (0.2.7-b2) is being used. Latest stable version is 0.2.6.
Running HMC Chain: 16it [00:04, 3.43it/s]
Spey - WARNING: An unstable version of Spey (0.2.7-b2) is being used. Latest stable version is 0.2.6.
Spey - WARNING: An unstable version of Spey (0.2.7-b2) is being used. Latest stable version is 0.2.6.
Spey - WARNING: An unstable version of Spey (0.2.7-b2) is being used. Latest stable version is 0.2.6.
Spey - WARNING: An unstable version of Spey (0.2.7-b2) is being used. Latest stable version is 0.2.6.
Spey - WARNING: An unstable version of Spey (0.2.7-b2) is being used. Latest stable version is 0.2.6.
Spey - WARNING: An unstable version of Spey (0.2.7-b2) is being used. Latest stable version is 0.2.6.
Running HMC Chain: 100it [00:33, 3.02it/s]
ContourResult(theta_mle=array([-1.07916624, 0.36336828, -0.09214556]), nll_min=7.090944826540303, threshold=10.998308778165892, delta=7.8147279032511765, contour_points=array([[ -2.84559878, 1.9755481 , 0.64245939],
[ 0.55722097, -1.24603069, -0.69750495],
[ 0.24860554, -1.24318741, -0.38716747],
...,
[-49.9221291 , -5.51807397, 20.26939748],
[-49.95411055, -5.51889602, 20.32220829],
[-49.98602794, -5.51984623, 20.37516206]]), from_radial=array([ True, True, True, ..., False, False, False]), parameter_names=['signal_par_0', 'signal_par_1', 'signal_par_2'], confidence_level=0.95, dof=3)
# ── Inspect the ContourResult ─────────────────────────────────────────────────
print("=" * 55)
print("ContourResult summary")
print("=" * 55)
print(f"Confidence level : {result.confidence_level:.0%}")
print(f"Degrees of freedom : k = {result.dof} (signal-shape params only)")
print(f"Chi-squared threshold : Δ = {result.delta:.4f}")
print(f"NLL at MLE (mu=1) : {result.nll_min:.6f}")
print(f"NLL threshold : T = {result.threshold:.6f}")
print()
print("Signal-parameter MLE (mu=1 fixed):")
for name, val in zip(result.parameter_names, result.theta_mle):
print(f" {name:18s} = {val:+.4f}")
print()
print(f"Total contour points : {len(result.contour_points)}")
print(f" From radial search : {result.from_radial.sum()}")
print(f" From RATTLE HMC : {(~result.from_radial).sum()}")
=======================================================
ContourResult summary
=======================================================
Confidence level : 95%
Degrees of freedom : k = 3 (signal-shape params only)
Chi-squared threshold : Δ = 7.8147
NLL at MLE (mu=1) : 7.090945
NLL threshold : T = 10.998309
Signal-parameter MLE (mu=1 fixed):
signal_par_0 = -1.0792
signal_par_1 = +0.3634
signal_par_2 = -0.0921
Total contour points : 149249
From radial search : 1959
From RATTLE HMC : 147290
# ── Verify that contour points satisfy NLL(θs) ≈ T ───────────────────────────
rng_check = np.random.default_rng(0)
check_idx = rng_check.choice(
len(result.contour_points),
size=min(40, len(result.contour_points)),
replace=False,
)
residuals = np.array(
[nll_fixed(result.contour_points[i]) - result.threshold for i in check_idx]
)
print(f"Spot-check of {len(check_idx)} contour points:")
print(f" Max |NLL(θs) − T| = {np.abs(residuals).max():.2e}")
print(f" Mean |NLL(θs) − T| = {np.abs(residuals).mean():.2e}")
print()
print("All residuals small → points lie on the constraint surface.")
Spot-check of 40 contour points:
Max |NLL(θs) − T| = 3.83e-10
Mean |NLL(θs) − T| = 4.35e-11
All residuals small → points lie on the constraint surface.
6 · Visualising the Confidence Contour#
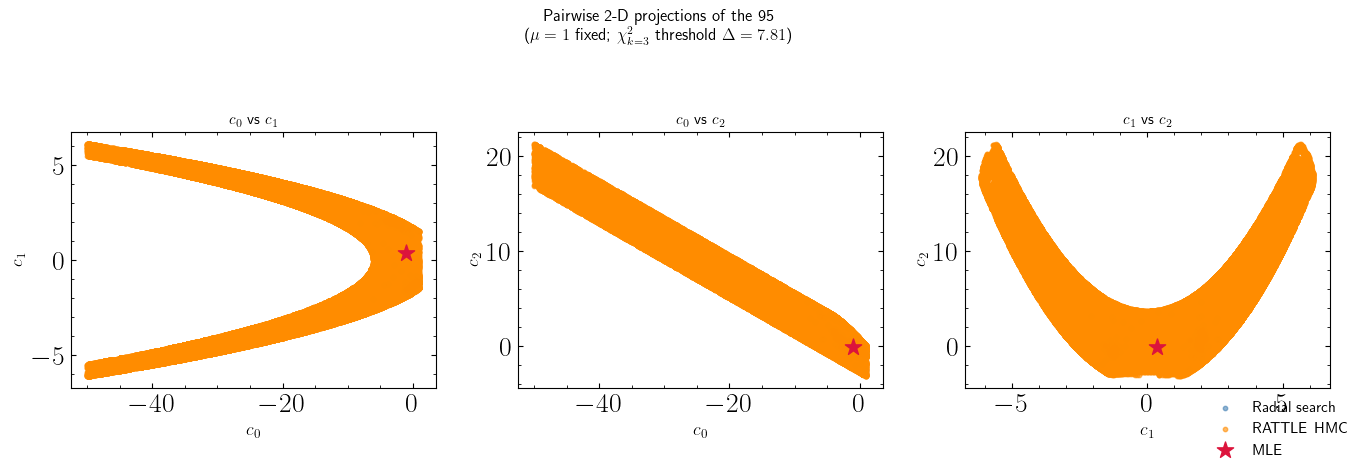
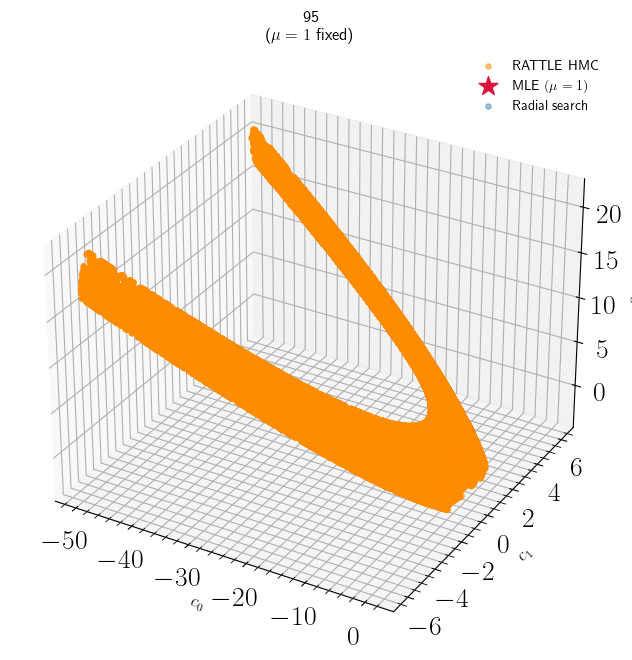
With \(k=3\) signal-shape parameters the confidence contour is a 2-dimensional surface in 3-dimensional space. We show:
Three pairwise 2-D projections: \((c_0,c_1)\), \((c_0,c_2)\), \((c_1,c_2)\).
A 3-D scatter plot of all contour points.
A residual histogram confirming all points satisfy \(\mathrm{NLL}(\theta_s) \approx T\).
Points are coloured by their origin: blue = radial search, orange = RATTLE HMC. The MLE is the red star.
pts = result.contour_points # shape (N, 3)
radial_mask = result.from_radial # bool
mle = result.theta_mle # (c0_hat, c1_hat, c2_hat)
latex_names = [r"$c_0$", r"$c_1$", r"$c_2$"]
pairs = list(combinations(range(k), 2)) # 3 pairs for k=3
fig, axes = plt.subplots(1, 3, figsize=(14, 4.5))
fig.suptitle(
"Pairwise 2-D projections of the 95% CL confidence contour\n"
rf"($\mu=1$ fixed; $\chi^2_{{k=3}}$ threshold $\Delta = {result.delta:.2f}$)",
fontsize=12,
y=1.02,
)
for ax, (i, j) in zip(axes, pairs):
ax.scatter(
pts[radial_mask, i],
pts[radial_mask, j],
s=10,
alpha=0.6,
color="steelblue",
label="Radial search",
)
ax.scatter(
pts[~radial_mask, i],
pts[~radial_mask, j],
s=10,
alpha=0.6,
color="darkorange",
label="RATTLE HMC",
)
ax.scatter(mle[i], mle[j], s=150, color="crimson", marker="*", zorder=5, label="MLE")
ax.set_xlabel(latex_names[i], fontsize=13)
ax.set_ylabel(latex_names[j], fontsize=13)
ax.set_title(f"{latex_names[i]} vs {latex_names[j]}", fontsize=11)
handles, labels = axes[0].get_legend_handles_labels()
fig.legend(handles, labels, loc="lower right", fontsize=11, framealpha=0.9)
plt.tight_layout()
plt.show()
# ── 3-D scatter of the contour surface ───────────────────────────────────────
from mpl_toolkits.mplot3d import Axes3D # noqa: F401
fig = plt.figure(figsize=(9, 7))
ax3 = fig.add_subplot(111, projection="3d")
ax3.scatter(
pts[~radial_mask, 0],
pts[~radial_mask, 1],
pts[~radial_mask, 2],
s=14,
alpha=0.5,
color="darkorange",
label="RATTLE HMC",
)
ax3.scatter(
mle[0],
mle[1],
mle[2],
s=200,
color="crimson",
marker="*",
zorder=6,
label="MLE $(\\mu=1)$",
)
ax3.scatter(
pts[radial_mask, 0],
pts[radial_mask, 1],
pts[radial_mask, 2],
s=14,
alpha=0.5,
color="steelblue",
label="Radial search",
zorder=100,
)
ax3.set_xlabel(r"$c_0$", fontsize=12)
ax3.set_ylabel(r"$c_1$", fontsize=12)
ax3.set_zlabel(r"$c_2$", fontsize=12)
ax3.set_title(
r"95% CL contour surface in $(c_0, c_1, c_2)$ signal-parameter space"
"\n" + r"($\mu=1$ fixed)",
fontsize=12,
)
ax3.legend(fontsize=10)
plt.tight_layout()
plt.show()
# ── NLL residuals at all contour points ──────────────────────────────────────
nll_vals_all = np.array([nll_fixed(pts[i]) for i in range(len(pts))])
residuals_all = nll_vals_all - result.threshold
fig, axes = plt.subplots(1, 2, figsize=(12, 4))
axes[0].hist(
nll_vals_all[radial_mask], bins=30, alpha=0.7, color="steelblue", label="Radial"
)
axes[0].hist(
nll_vals_all[~radial_mask], bins=30, alpha=0.7, color="darkorange", label="RATTLE"
)
axes[0].axvline(
result.threshold, color="k", ls="--", lw=2, label=f"T = {result.threshold:.3f}"
)
axes[0].set_xlabel(r"$\mathrm{NLL}(\theta_s)$", fontsize=12)
axes[0].set_ylabel("Count", fontsize=12)
axes[0].set_title("NLL at contour points", fontsize=12)
axes[0].legend()
axes[1].hist(
residuals_all[radial_mask], bins=30, alpha=0.7, color="steelblue", label="Radial"
)
axes[1].hist(
residuals_all[~radial_mask], bins=30, alpha=0.7, color="darkorange", label="RATTLE"
)
axes[1].axvline(0, color="k", ls="--", lw=2)
axes[1].set_xlabel(r"$\mathrm{NLL}(\theta_s) - T$", fontsize=12)
axes[1].set_ylabel("Count", fontsize=12)
axes[1].set_title("Residuals (should peak at 0)", fontsize=12)
axes[1].legend()
plt.tight_layout()
plt.show()
print(f"Max |residual| : {np.abs(residuals_all).max():.2e}")
print(f"Mean |residual| : {np.abs(residuals_all).mean():.2e}")
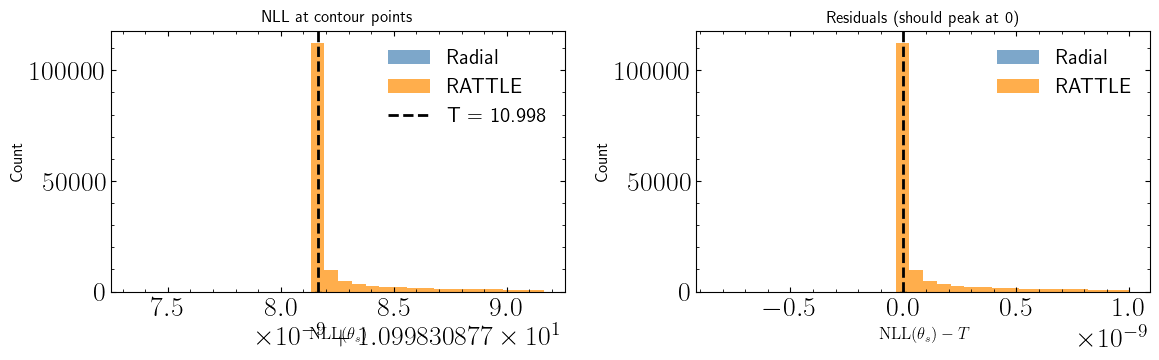
Max |residual| : 1.00e-09
Mean |residual| : 7.31e-11
7 · Algorithm Walk-through#
This section steps through each internal stage manually.
Stage 1 — Pre-whitening in signal-parameter space#
find_contour evaluates the full \(4\times4\) Hessian of \(\log\mathcal{L}\) at \((\mu=1,\,\hat\theta_s)\), then extracts the \(3\times3\) signal-parameter block:
After Cholesky factorisation \(G = LL^T\), the whitened coordinate \(\varphi = L(\theta_s - \hat\theta_s)\) makes the contour approximately spherical in the 3-D signal space.
# ── Full Hessian at (mu=1, theta_mle_signal) ─────────────────────────────────
hessian_fn = stat_model.backend.get_hessian_logpdf_func()
theta_mle_full = np.concatenate([[1.0], mle]) # [mu=1, c0_hat, c1_hat, c2_hat]
H_full = np.array(hessian_fn(theta_mle_full), dtype=float) # 4×4
print("Full 4×4 Hessian of logpdf at (mu=1, θ̂s):")
print(np.round(H_full, 4))
print()
# ── Extract the 3×3 signal-parameter block ───────────────────────────────────
ix = np.ix_(signal_indices, signal_indices)
H_signal = H_full[ix] # 3×3 block
G_signal = -H_signal # Fisher information for signal params
print("3×3 signal-parameter block G = -H_signal:")
print(np.round(G_signal, 4))
print()
eigvals = np.linalg.eigvalsh(G_signal)
print(f"Eigenvalues of G: {eigvals.round(4)}")
print("(Large spread → strongly anisotropic → whitening is important)")
Full 4×4 Hessian of logpdf at (mu=1, θ̂s):
[[-2.0413 1.8607 0.9961 2.3241]
[ 1.8607 -1.7084 -0.9474 -2.0542]
[ 0.9961 -0.9474 -0.6137 -0.9256]
[ 2.3241 -2.0542 -0.9256 -2.9886]]
3×3 signal-parameter block G = -H_signal:
[[1.7084 0.9474 2.0542]
[0.9474 0.6137 0.9256]
[2.0542 0.9256 2.9886]]
Eigenvalues of G: [2.0000e-04 4.1090e-01 4.8997e+00]
(Large spread → strongly anisotropic → whitening is important)
# ── Cholesky factorisation ─────────────────────────────────────────────────────
reg = 1e-8
w, V = np.linalg.eigh(G_signal)
w_reg = np.maximum(w, reg)
G_reg = (V * w_reg) @ V.T
L = np.linalg.cholesky(G_reg)
print("Cholesky factor L (3×3):")
print(np.round(L, 4))
print()
print(f"Approx. whitened-space contour radius √Δ = {np.sqrt(delta):.4f}")
print("Radial search starts with this as the initial bracket radius.")
Cholesky factor L (3×3):
[[ 1.3071 0. 0. ]
[ 0.7248 0.2972 0. ]
[ 1.5716 -0.7185 0.0478]]
Approx. whitened-space contour radius √Δ = 2.7955
Radial search starts with this as the initial bracket radius.
Stage 2 — Radial Search#
For each random unit vector \(\hat{e}\) on \(S^2\), the algorithm solves
via Brent’s method. Note that the NLL here is always evaluated with \(\mu=1\):
from scipy.optimize import root_scalar
L_inv_T = np.linalg.solve(L, np.eye(k)).T # L^{-T}
rng_demo = np.random.default_rng(7)
z = rng_demo.standard_normal(k)
e = z / np.linalg.norm(z) # random unit vector on S²
def f(r):
theta_s = mle + L_inv_T @ (r * e)
return nll_fixed(theta_s) - result.threshold
r_vals = np.linspace(0.01, 6.0, 200)
f_vals = np.array([f(r) for r in r_vals])
r_hi = np.sqrt(delta)
while f(r_hi) <= 0 and r_hi < 30:
r_hi *= 2
sol = root_scalar(f, bracket=[1e-8, r_hi], method="brentq", xtol=1e-12)
r_star = sol.root
theta_star = mle + L_inv_T @ (r_star * e)
fig, ax = plt.subplots(figsize=(8, 4))
ax.plot(r_vals, f_vals, color="steelblue", lw=2)
ax.axhline(0, color="k", lw=0.8)
ax.axvline(r_star, color="tomato", ls="--", lw=2, label=rf"$r^*$ = {r_star:.3f}")
ax.scatter([r_star], [0], color="tomato", s=80, zorder=5)
ax.set_xlabel(r"$r$ (whitened-space radius)", fontsize=12)
ax.set_ylabel(r"$f(r) = \mathrm{NLL}(\hat\theta_s + L^{-T}r\hat{e}) - T$", fontsize=11)
ax.set_title(r"Radial profile along one random direction ($\mu=1$ fixed)", fontsize=12)
ax.legend(fontsize=11)
plt.tight_layout()
plt.show()
print(f"Root r* = {r_star:.4f}")
print(f"NLL(θ*) = {nll_fixed(theta_star):.6f}")
print(f"Threshold T = {result.threshold:.6f}")
print(f"Residual = {abs(nll_fixed(theta_star) - result.threshold):.2e}")
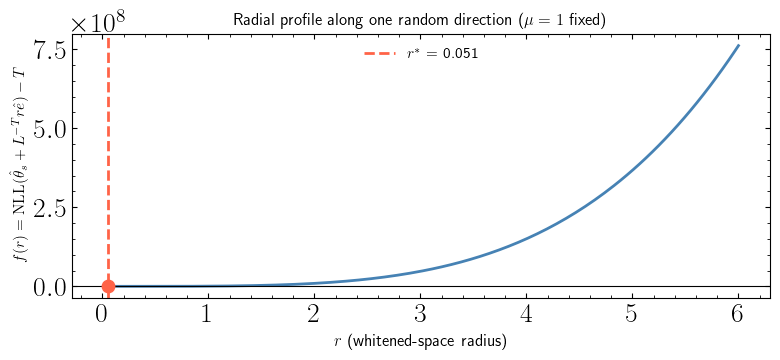
Root r* = 0.0507
NLL(θ*) = 10.998309
Threshold T = 10.998309
Residual = 9.91e-13
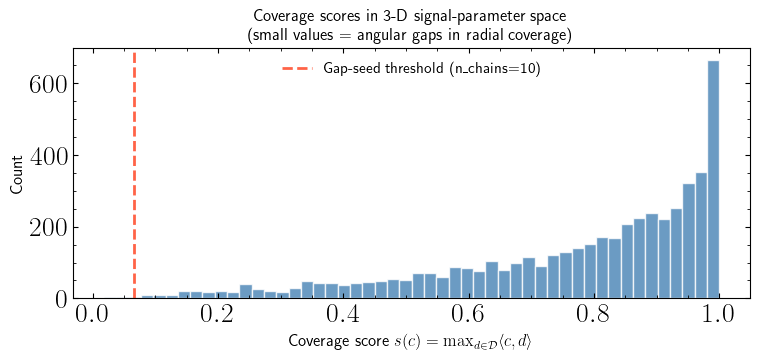
Stage 3 — Gap Detection#
After the radial search, \(M \gg N\) candidate unit vectors \(c\) on \(S^2\) are sampled and scored by their maximum cosine similarity to the already-found directions:
The \(n_{\rm chains}\) candidates with the smallest \(s\) (largest angular gap) seed the RATTLE chains.
# ── Coverage scores over a large candidate set ───────────────────────────────
radial_pts = result.contour_points[result.from_radial] # radial contour points
# Whitened directions corresponding to the radial contour points
phi_radial = (radial_pts - mle) @ L.T
dirs_radial = phi_radial / np.linalg.norm(phi_radial, axis=1, keepdims=True)
rng_gap = np.random.default_rng(99)
M = 5000
Z = rng_gap.standard_normal((M, k))
cands = Z / np.linalg.norm(Z, axis=1, keepdims=True)
cos_sim = cands @ dirs_radial.T
coverage = np.max(cos_sim, axis=1)
n_chains = 10
gap_threshold = np.sort(coverage)[n_chains]
fig, ax = plt.subplots(figsize=(8, 4))
ax.hist(coverage, bins=50, color="steelblue", alpha=0.8, edgecolor="white")
ax.axvline(
gap_threshold,
color="tomato",
ls="--",
lw=2,
label=f"Gap-seed threshold (n_chains={n_chains})",
)
ax.set_xlabel(
r"Coverage score $s(c) = \max_{d\in\mathcal{D}}\langle c,d\rangle$", fontsize=12
)
ax.set_ylabel("Count", fontsize=12)
ax.set_title(
"Coverage scores in 3-D signal-parameter space\n"
"(small values = angular gaps in radial coverage)",
fontsize=12,
)
ax.legend(fontsize=11)
plt.tight_layout()
plt.show()
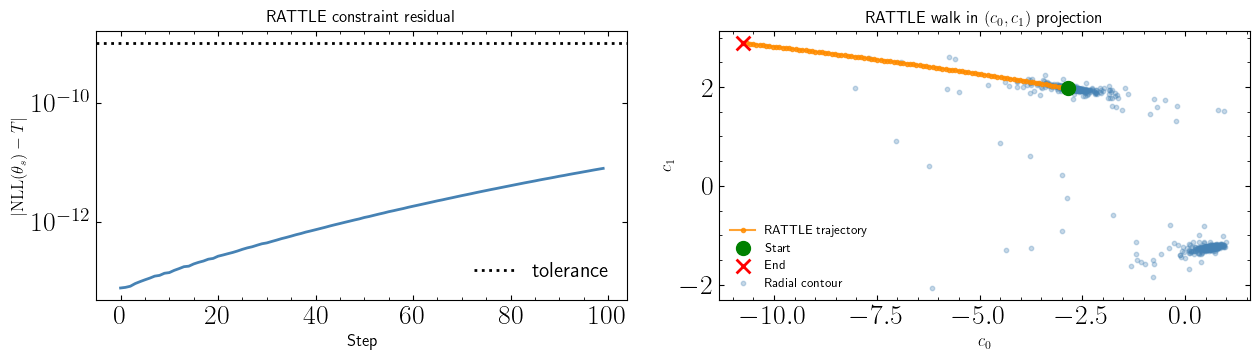
Stage 4 — Constrained RATTLE HMC#
The RATTLE algorithm walks along the constraint surface \(C(\theta_s) = \mathrm{NLL}(\theta_s) - T = 0\) using gradient information. The NLL gradient is computed by autograd, which differentiates through the anp.concatenate([..., [1.0], ...]) insertion used to fix \(\mu=1\):
One RATTLE leapfrog step (step size \(\varepsilon\)):
import autograd
import autograd.numpy as anp
# ── Build autograd-differentiable NLL with mu=1 fixed ────────────────────────
logpdf_ag = stat_model.backend.get_logpdf_func()
def _nll_auto(signal_pars):
"""NLL(c0,c1,c2) with mu=1 inserted at poi_index=0; autograd-traced."""
full_pars = anp.concatenate([anp.array([1.0]), signal_pars])
return -logpdf_ag(full_pars)
_grad_auto = autograd.grad(_nll_auto)
def grad_nll(signal_pars):
return np.array(_grad_auto(np.asarray(signal_pars, dtype=float)), dtype=float)
# ── Short RATTLE walk from a radial contour point ────────────────────────────
start = result.contour_points[0].copy()
# Project start onto constraint surface (handle tiny numerical drift)
theta_walk = start.copy()
for _ in range(50):
res_val = nll_fixed(theta_walk) - result.threshold
if abs(res_val) < 1e-9:
break
g = grad_nll(theta_walk)
theta_walk -= (res_val / np.dot(g, g)) * g
# Initial tangent-space momentum
rng_walk = np.random.default_rng(1234)
g0 = grad_nll(theta_walk)
raw_p = rng_walk.standard_normal(k)
p_walk = raw_p - (np.dot(raw_p, g0) / np.dot(g0, g0)) * g0
eps = 0.05
trajectory = [theta_walk.copy()]
resid_track = []
for step in range(100):
g = grad_nll(theta_walk)
p_half = p_walk - (eps / 2) * g
theta_prime = theta_walk + eps * p_half
# SHAKE: Newton projection onto NLL = T
for _ in range(100):
rv = nll_fixed(theta_prime) - result.threshold
if abs(rv) < 1e-9:
break
gp = grad_nll(theta_prime)
theta_prime -= (rv / np.dot(gp, gp)) * gp
g1 = grad_nll(theta_prime)
p_prime = p_half - (eps / 2) * g1
p_walk = p_prime - (np.dot(p_prime, g1) / np.dot(g1, g1)) * g1 # tangent proj.
theta_walk = theta_prime
trajectory.append(theta_walk.copy())
resid_track.append(abs(nll_fixed(theta_walk) - result.threshold))
trajectory = np.array(trajectory)
# ── Plots ─────────────────────────────────────────────────────────────────────
fig, axes = plt.subplots(1, 2, figsize=(13, 4))
axes[0].semilogy(resid_track, color="steelblue", lw=2)
axes[0].axhline(1e-9, color="k", ls=":", label="tolerance")
axes[0].set_xlabel("Step", fontsize=12)
axes[0].set_ylabel(r"$|\mathrm{NLL}(\theta_s) - T|$", fontsize=12)
axes[0].set_title("RATTLE constraint residual", fontsize=12)
axes[0].legend()
axes[1].plot(
trajectory[:, 0],
trajectory[:, 1],
"o-",
color="darkorange",
ms=3,
lw=1.5,
alpha=0.8,
label="RATTLE trajectory",
)
axes[1].scatter(
trajectory[0, 0], trajectory[0, 1], s=100, color="green", zorder=5, label="Start"
)
axes[1].scatter(
trajectory[-1, 0],
trajectory[-1, 1],
s=100,
color="red",
marker="x",
zorder=5,
label="End",
)
axes[1].scatter(
radial_pts[:, 0],
radial_pts[:, 1],
s=10,
alpha=0.3,
color="steelblue",
label="Radial contour",
)
axes[1].set_xlabel(r"$c_0$", fontsize=12)
axes[1].set_ylabel(r"$c_1$", fontsize=12)
axes[1].set_title(r"RATTLE walk in $(c_0, c_1)$ projection", fontsize=12)
axes[1].legend(fontsize=9)
plt.tight_layout()
plt.show()
Summary#
In this notebook we have:
Built a statistical model with four backend parameters \([\mu, c_0, c_1, c_2]\) using
MultivariateNormalwithn_signal_parameters=3.Fixed \(\mu=1\) throughout the analysis.
find_contourusescfg.poi_indexto identify and exclude the signal strength from the contour search, then inserts \(\mu=1\) at every NLL evaluation viaautograd.numpy.concatenate— keeping the function autograd-differentiable.Found the MLE \((\hat c_0, \hat c_1, \hat c_2)\) by passing
fixed_poi_value=1.0to the spey optimizer, which holds \(\mu\) fixed while minimising over the signal-shape parameters.Mapped the 95% CL contour — the 2-D surface in the 3-D \((c_0, c_1, c_2)\) space where \(\chi^2_{k=3}(\theta_s) = \Delta_{0.95} \approx 7.81\) — using:
Radial search in pre-whitened signal-parameter space, and
Constrained RATTLE HMC to fill angular gaps.
Visualised the result as pairwise 2-D projections and a 3-D scatter plot.
Further reading#
Wilks (1938), Ann. Math. Stat.
Andersen (1983), J. Comput. Phys. — RATTLE algorithm
spey.multiparameter.contourmodule — full mathematical derivation in module docstring